数据预处理,权重如何初始化,正则化方法,损失函数
数据预处理
神经网络输入的数据往往要经过预处理。假设数据X大小为[N x D],其中N表示元素个数,D表示维度。
减去均值
最长用的就是减去每个特征的均值(均值常常有训练集计算得到),减去均值的几何意义是将数据中心大致移到零点。。使用python时,可以用X-=np.mean(X, axis = 0)算得均值。如果是图像,常常减去RGB通道的均值。
正则化
正则化是指将数据各个维度归一化,即变化范围相同。一般有两种方法:1、将数据均值设为零(如减去均值),之后除以标准差:X /= np.std(X, axis=0)。2、不同维度的数据范围相差很大,且重要性相同,将其最大值和最小值分别变换为+1和-1。
下去就是原始数据,零中心化,正则化处理的效果。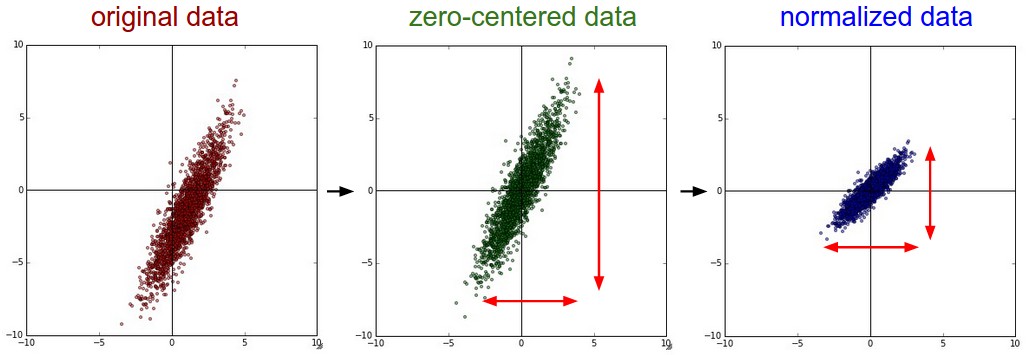
PCA and Whitening
PCA是用来降维,假设已经完成了零中心化和归一化,降维过程如下:
先计算协方差矩阵1
2
3# Assume input data matrix X of size [N x D]
X -= np.mean(X, axis = 0) # zero-center the data (important)
cov = np.dot(X.T, X) / X.shape[0] # get the data covariance matrix
协方差矩阵中(i,j)位的数据表示i维度和j维度数据的协方差;对角线上数据表示某一维度的方差。协方差矩阵是对称的半正定矩阵,对它进行SVD分解:
1 | U,S,V = np.linalg.svd(cov) |
得到U是特征向量矩阵,它的每一列都是一个特征向量,S是特征值向量,因为协方差矩阵是对称的半正定矩阵,所以它等于特征值平方。为了去除相关性,将已经中心化的数据映射到特征向量上
1 | Xrot = np.dot(X, U) # decorrelate the data |
其中U的每一列都是标准正交特征向量,且已经按照特征值由大到小排列(np.linalg.svg返回时已经排列)。与特征向量相乘,相当于对X的数据做一个旋转映射,映射到特征向量对应的正交基上。可以只保留前面较大特征值对应的特征向量,丢弃较小值对应的特征向量,以此来降维。这种方法叫做Principal component analysis
1 | Xrot_reduced = np.dot(X, U[:,:100]) # Xrot_reduced becomes [N x 100] |
通过这个操作,保留了前100维度数据(以方差大小为标准)。
经过PCA处理的数据,可以再经过白化Whitening处理。白化是指PCA处理后的数据,每个维度除以其特征值。几何解释就是服从多维度高斯分布的数据,经过白化处理后,服从均值为零,协方差相等的分布。1
2
3# whiten the data:
# divide by the eigenvalues (which are square roots of the singular values)
Xwhite = Xrot / np.sqrt(S + 1e-5)
上面处理为白化操作,分母加上1e-5为防止分母为零。这样的操作把所有维度数据拉伸到相同范围,可能会放大噪声,实际中可以通过增大分母(加上比1e-5更大的值)来平滑。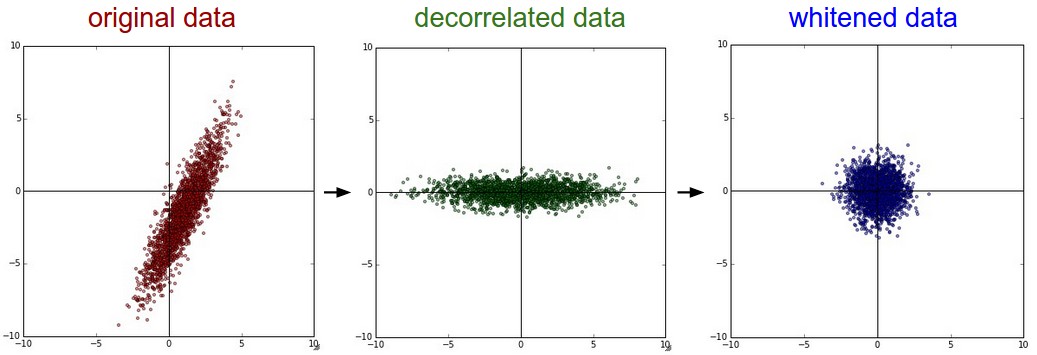
上图左边分布为原始数据。中间为PAC处理后的数据,可以看出PCA处理后,将坐标轴旋转,可以看出横轴信息量大,如果只保留一维数据,要丢弃纵轴数据。右边为白化处理后的数据,数据范围相同了
使用CIFAR-10来展示PCA和白化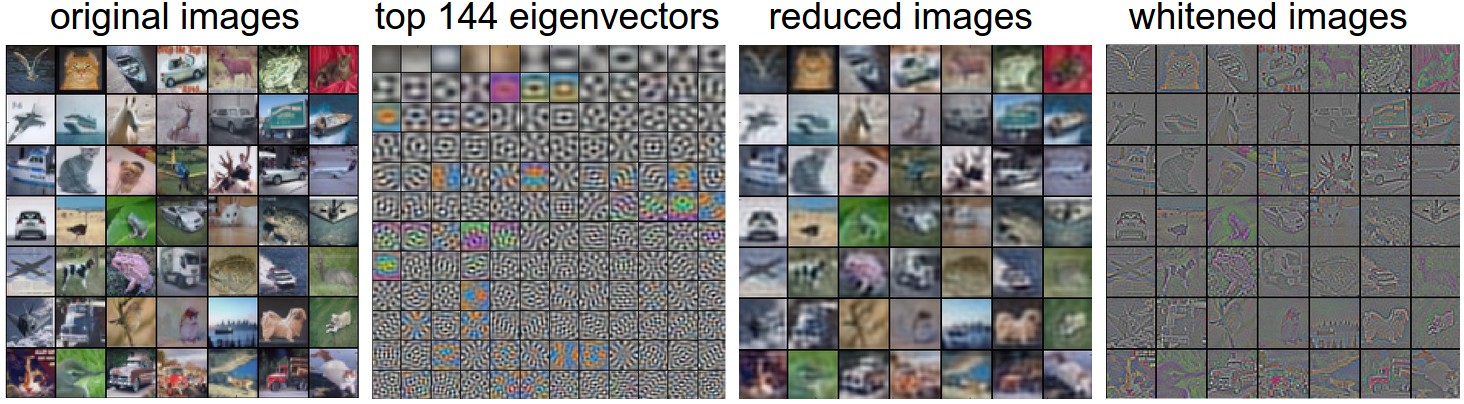
上图中,最左边为原始数据,每张图片可以看做是3072的列向量。第二张为特征向量中,前144个(按照特征值排列)。第三张为经过PAC降维处理后,只保留144维特征的图片;图片变模糊了,说明只保留了低频部分。最后一张为白化后的图片。
注意:CNN不需要进行PCA和白化操作,这里提到只是讲解数据处理的一般方法。
数据预处理,只能在训练集上应用。应该先将数据分为训练集、验证集、测试集,之后在训练集上应用数据预处理。
权重初始化
训练神经网络前,要先初始化权重。
全部初始化为零
权重最终的值我们不知道,但是根据前面数据预处理过程,大概可以猜到,权重最终应该是一般为正,一般为负。但是权重不能全部初始化为零。如果全部初始化为零,那么所有神经元输出将相同,计算得到所有梯度都相同,权重更新相同,最终得到的权重也相同。
小的随机数
因为正则化,权重要比较小,但是又不能对称;那么可以用小的随机数来初始化。这样计算得到不同梯度,迭代更新权重会趋向不同。例如这样初始化。W = 0.01 * np.random.randn(D, H),randn是生成零均值单位方差的高斯分布。这样初始化,每个神经权重向量是从高维高斯分布随机采样而来;也可是使用随机生成的随机数。但是在实际中,这样初始化效果不好。
小的权重并不一定会得到好的效果。神经网络中,如果权重比较小,那么反向传播时,梯度就比较小。这样会减小梯度传播的信号,在深度神经网络中也是个问题。
校准方差
如果神经元输出有着相似的分布,那么收敛速度回加快。前面提到的权重初始化方法,随着输入增大,输出的方差会增大。通过除以sqrt(n),其中n是输入个数,可以将输出方差归一化到1;例如这样初始化w = np.random.randn(n) / sqrt(n)。
不考虑非线性激活函数,假设输出$s = \sum_i^n w_i x_i$,那么计算输出方差和输入关系如下:
$$ % $$上面第三步中,用到了假设$E[x_i] = E[w_i] = 0$(注意,有些并不等于零,例如ReLU),最后一步假设了$x,w$服从相同分布。如果想要输出和$x$有相同的方差,那么$n \text{Var}(w)$必须为1,所以得到上面初始化方式w = np.random.randn(n) / sqrt(n)。
论文Understanding the difficulty of training deep feedforward neural networks推荐初始化方式为$\text{Var}(w) = 2/(n_{in} + n_{out})$,其中$n{in} ,n{out}$分布表示前一层和后一层网络中单元个数。论文 Delving Deep into Rectifiers: Surpassing Human-Level Performance on ImageNet Classification 提出,针对ReLU初始化,网络中神经元方差为$2.0/n$,这样初始化变为w = np.random.randn(n) * sqrt(2.0/n);在实践中使用ReLU时,推荐这样初始化。。
稀疏初始化
首先将所有权重初始化为零,但是为了避免对称,随机在层之间连接个别神经全,权重初始化可以使用小的高斯分布,连接个数常常设置为10.
实际应用
目录,使用ReLU激活函数的,建议初始化为w = np.random.randn(n) * sqrt(2.0/n),参考He et al
批归一化 Batch Normalization
这是个最近出现的技术,参考论文。它在一定程度上减轻了如何初始化网络权重的问题。具体做法为让数据在输入激活函数前先通过一个网络,通过这个网络之后,输出数据(即输入激活函数的数据)服从标准高斯分布。因为归一化是一个可以简单的求导操作,因此方案可行。实际应用中,常常在全连接层(卷积层)和激活函数(非线性操作)之间插入一个BatchNormalization层。批归一化可以理解为在网络每一层之前都做了预处理。
正则化
正则化用来阻止网络过拟合,有以下几种方法:
L2 regularization
L2正则化是最常用的方法;它可以直接惩罚目标函数中任何一个权重平方的幅度。具体实现时对于每一个权重$w$在目标函数都加上一项$\frac{1}{2}\lambda w^2$,其中$\lambda$常常等于$\frac{1}{2}$,这样方便求导运算。L2正则化可以直观理解为,它限制单个较大的权重,在权重和不变时,它把权重大概均匀分不到每个权重上。使用L2正则化后,在反向传播梯度更新时,权重会以W+=-lambda * W速度向0靠近。
L1 regularization
L1正则化也是常用的一种方法,在目标函数中,它给每个权重加上一项$\lambda |w|$。可以把L1和L2正则化结合起来$\lambda_1|w| + \lambda_2 w^2$(叫做Elastic net regularization)。L1正则化会使权重矩阵变得稀疏(非常接近0);经过L1正则化后,使用时,用的就是输入的子集了(某些权重系数接近0,对应输入会变为0)。而L2正则化后,权重会变为大小分布均匀且都接近0的数。使用中,如果没有显示去选择特征,那么L2正则化效果一般优于L1正则化。
Max norm constraints
Max norm正则化限制梯度幅度最大值,并使用投影梯度来确保限制。使用中,参数更新方式不变,只需要检查更新后满足$||\overrightarrow{w}||_2 < c$,不满足则消减梯度。$c$常常设置为3或4。使用这个约束后,网络就不会“爆炸”,因为它限制了权重大小。
Dropout
Drop是非常简单高效的正则化方法,在论文Dropout: A Simple Way to Prevent Neural Networks from Overfitting 中介绍,可以作为上面正则化方法的补充。它的思想为在训练时,让神经元以概率$p$激活(或者设置为零,不激活)。
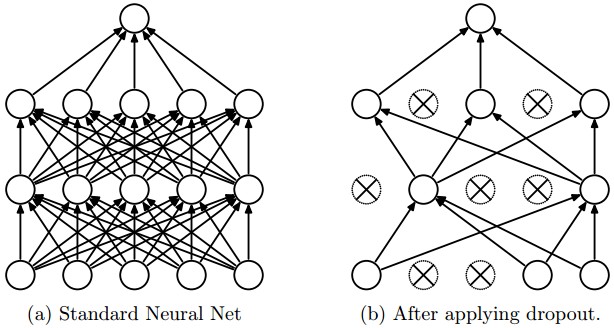
例如上面图片中,左边是没有使用Dropout的网络,右边是使用了Dropout的网络。需要注意,Dropout只是在训练的时候使用,在测试时,不使用。
3层网络Dropout代码1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24""" Vanilla Dropout: Not recommended implementation (see notes below) """
p = 0.5 # probability of keeping a unit active. higher = less dropout
def train_step(X):
""" X contains the data """
# forward pass for example 3-layer neural network
H1 = np.maximum(0, np.dot(W1, X) + b1)
U1 = np.random.rand(*H1.shape) < p # first dropout mask
H1 *= U1 # drop!
H2 = np.maximum(0, np.dot(W2, H1) + b2)
U2 = np.random.rand(*H2.shape) < p # second dropout mask
H2 *= U2 # drop!
out = np.dot(W3, H2) + b3
# backward pass: compute gradients... (not shown)
# perform parameter update... (not shown)
def predict(X):
# ensembled forward pass
H1 = np.maximum(0, np.dot(W1, X) + b1) * p # NOTE: scale the activations
H2 = np.maximum(0, np.dot(W2, H1) + b2) * p # NOTE: scale the activations
out = np.dot(W3, H2) + b3
在训练时使用了Dropout,在预测没有使用Dropout。在使用DropOut时,以概率$p$来激活神经元,那么一层网络的输出会变为原来的$p$倍;在预测是不使用DropOut,为了使得每一层输出值和训练时一致,在每一层计算后也要乘以概率$p$。
因为我们更加关心测试时的性能,在预测时增加计算会减低生产环境性能;一个解决的方法为在训练时,把使用DropOut的层除以概率$p$,这个方法叫做Inverted dropout。
1 | """ |
更多内容可以参考
Dropout paper by Srivastava et al. 2014.
Dropout Training as Adaptive Regularization: “we show that the dropout regularizer is first-order equivalent to an L2 regularizer applied after scaling the features by an estimate of the inverse diagonal Fisher information matrix”
Theme of noise in forward pass
DropOut是在前向传播时引入一些随机行为,在预测时通过数值方法补偿这个随机行为。这样类似的方法还有DropConnect。
Bias regularization
偏置不直接和输入数据相乘,它并不直接影响某一维度的数据,因此常常不用对偏置正则化。实际应用中,数据合理预处理后,对偏置正则化也很少导致算法性能变差;可能是因为权重系数远远多于偏置。
Per-layer regularization.
不同的层使用不同的正则化方法。很少见。
实践
1、全局使用L2正则化,$\lambda$大小通过交叉验证获得。
2、使用L2正则化后,常常再结合Dropout,一般可以设置$p=0.5$,也可以通过交叉验证获得。
损失函数
这里来讨论损失函数中的数据损失部分,在监督学习中常常用到,用来衡量预测值和真实值的差异程度。损失函数是输入数据的平均$L=\sum\frac{1}{N}_i L_i$,其中$N$是训练集大小。实际常常常常遇到以下几类问题
分类问题
这里假设每个样本都只有一个标签,最常用的两个损失函数为:
$$ L_i = \sum_{j\neq y_i} \max(0, f_j - f_{y_i} + 1) $$ $$ L_i = -\log\left(\frac{e^{f_{y_i}}}{ \sum_j e^{f_j} }\right) $$第一个是SVM分类中用到的,第二个时Softmax分类器用到的交叉熵loss。
Problem: Large number of classes.
当标签集合特别大时(例如单词字典等),要使用Hierarchical Softmax。其思想为,把标签构建为一棵树,每个标签为树的一条路径,在树的每个结点训练Softmax分类器。树的结构要依具体问题而定。
Attribute classification
如果一个样本的标签不止一个时,例如标签$y_i$是一个二值向量,可能包含标签集合中的某几个标签,且标签不互斥。这时可以为每个标签建立一个二值分类器:
$$ L_i = \sum_j \max(0, 1 - y_{ij} f_j) $$$j$表示lable数量,$y{ij}$表示第$i$个样本是否包含第$j$个标签,如果包含$y{ij}$为+1,否则为-1;$f_i$表示预测值,正确预测时其值为正,否则为负。可以计算,当正确预测且分值小于1,或错误预测分值大于-1时,loss就会大于零。
还有一个方法,就是对每个标签训练一个分类器,那么loss函数为
$$ L_i = \sum_j y_{ij} \log(\sigma(f_j)) + (1 - y_{ij}) \log(1 - \sigma(f_j)) $$这里$y_{ij}$是1(表示包含标签j)或0(不包含标签j)。
回归
对于预测连续值,回归问题的loss函数有L2正则化和L1正则化形式,分别为
$$ L_i = \Vert f - y_i \Vert_2^2 $$ $$ L_i = \Vert f - y_i \Vert_1 = \sum_j \mid f_j - (y_i)_j \mid $$注意
1、与更加稳定的loss(例如Softmax),L2 loss更加难以优化。L2 loss要求每个输入都要输出正确值;而Softmax的评分并不重要,只有当评分在适当量级时才有意义。
2、L2 Norm的鲁棒性并不好,异常值可能引起很大的梯度。
3、面对回归问题时,优先想想能不能转换为分类问题。
4、如果使用回归,L2是一个不错的选择。但是在dorpout网络结构中,不宜再用L2。
Structured prediction
结构化预测是指标签是任意的形状(树,图等),通常假设结构空间非常大且难以遍历。其思想和结构化SVM类似,在正确分类和分值最高的错误分类间建立一个分类面。
总结
1、数据预处理:零中心化,正则化把特征范围缩放为[-1,1]。
2、初始化权重方法,通过使用高斯分布,标准差为$\sqrt{2/n}$。
3、正则化L2,L1,Dropout。
4、BachNorm。
5、Loss函数