梯度检查,参数更新,超参数优化和模型评估
梯度检查
梯度检查在理论上,对比推导的梯度和数值计算的梯度即可;在实践中,并不这么简单。
使用中心化形式的梯度计算
课本中都学过,梯度计算公式:
$$ \frac{df(x)}{dx} = \frac{f(x + h) - f(x)}{h} $$$h$一般是很小的值,实践中数量级为$1e-5$。
上面这种计算梯度公式实践中不常用,实践中常常用中心化形式:
$$ \frac{df(x)}{dx} = \frac{f(x + h) - f(x - h)}{2h} $$这种中心化的形式,要求计算损失函数2次,带来的好处就是梯度精度提高了。可以使用泰勒级数展开验证,非中心化形式梯度计算公式误差为$O(h)$,中心化形式误差为$O(h^2)$
使用相对误差
数值梯度$f^{‘}_n$和推导梯度$f^{‘}_a$之间差异的对比,要比较两者的相对误差:
$$ \frac{\mid f'_a - f'_n \mid}{\max(\mid f'_a \mid, \mid f'_n \mid)} $$上面的分布上的$\max$运算可以替换为加法,这样可以避免分母为零的情况,但是也要注意两者绝对值都为零的情况。在实践中:
1、相对误差大于1e-2时,极可能梯度计算错误。
2、相对误差在1e-2和1e-4之间,有可能梯度计算错误。
3、相对误差小于1e-4,对于不光滑的激励函数来说可以接受;对于光滑激励函数(使用tanh nonlinearities和softmax),还是过高。
4、小于1e-7,一般来说是正确的。
注意,网络结果越深,梯度误差可能越大,因为在传播时误差会积累。例如一个10层的网络,相对误差为1e-2也可以接受;但是对于一个可导函数时,1e-2就不能接受了。
使用双精度
使用双精度将更加准确,有时单精度计算相对误差为1e-2,换成双精度后会变化1e-8。
数值范围要在单精度精确度内
读一下What Every Computer Scientist Should Know About Floating-Point Arithmetic会让你编码更加小心,减少错误。例如神经网络中,常常要对一个batch数据计算得到的loss函数进行归一化;如果loss函数本来就很小,进行归一化再去除以一个值,得到的归一化loss函数值将会更小,从而引起一系列问题。因此,常常需要把解析梯度和数值梯度的原始值打印出来,确保它们不是特别小。如果的确比较小,可以进行放大,一般放大的数值量级为1.0。
目标函数中的不连续点
梯度检查失败时,很可能是因为目标函数中的不连续点,函数ReLU、SVM loss、Maxout会引入不连续点。例如对于ReLU($\max(0,x)$),$x=-1e-6$,$h>-1e-6$,那么$f(x+h)$和$f(x-h)$会在不连续点的两侧。
这不是极端情况,对于CIFAR-10,有50000个样本,每个样本有9个目标函数,那么总共有450000个$\max(0,x)$函数。
在计算梯度时,可以知道是否越过了不可导点。在前向传播时,记录$\max(x,y)$那个最大,在计算$f(x+h)$和f(x-h$时,如果至少有一个最大值发生变化,那么说明越过了不可导点。
使用少量数据点
使用数据点少,碰到上面不可导点的情况就少。使用数据点少,可以减小计算量,增快速度;如果只是检查2-3个点的梯度,那么可以检查整个batch的梯度。
注意h的大小
理论上$h$越小越好,但是实际中$h$不能太小,否则有数值问题,常常使用1e-4或1e-6。可以参考这里。
在典型mode检查
梯度检查只是在一些特定的点检查,即使这些点正确,放到全局也未必正确。尽可能选择典型mode检查梯度,例如svm训练,初始化后,不同类的score都接近0,这时最好不要检查梯度;果断事件,让网络学习一小段事件,loss函数下降之后在检查。
不要让正则化淹没数据
loss函数中有正则化的loss和data loss,在梯度检查时,不要让正则化的loss淹没了data loss。一种做法是在检查梯度时去掉正则化loss,检查正则化的梯度时,可以去掉data loss或增大正则化loss的权重。
关闭drop out和数据扩展
在检查梯度时,要去掉网络中的不确定因素,关掉drop out和数据扩展。关掉它们后,就无法对它们的正确性进行检查,一种更好的方法为在计算$f(x+h),f(x-h$前增加一个特定的随机种子,在计算推导梯度时也是如此。
检查少量维度
实践中,梯度可能有几百万个参,这种情况下,只需要检查几个维度,假设其他维度正确即可。但是要注意,要检查这些维度的每一个参数。例如,偏置数量很少,随机抽取可能检查不到偏置。
学习之前:合理检查的技巧
查看特定情况下的loss
当用小的值初始化参数时,确保期望的loss和实际loss一致。最好先去掉正则项,单独检查data loss。例如使用Softmax分类CIFAR-10时,初始化后得到的data loss应该是2.302($-\ln(0.1)=2.302$)。对于SVM,初始时所有的score都为0,所以data loss为9。
增强正则化
增强正则化项时,loss增大。
过拟合一个小数据集
在进行全量数据训练前,使用一个小数据集训练(例如20个数据),去掉正则化项,这样可以确保得到loss值为0。即使在小数据集上得到loss为0,也未必完全正确。例如数据集是随机的,对于小数据集可以拟合,但是对于大数据集还是无法拟合。
观察训练过程
在训练过程中需要观察期过程,观察几个参数的变化过程。
训练过程中,日志往往记录着参数变化,可以将参数变化画成图,这样更加形象。横轴x一般表示epoch,用来衡量样本在训练中使用的次数,所有样本使用一次为1个epoch。有些使用迭代次数,需要注意的是迭代次数xbatchsize才是使用样本量。
Loss函数
第一个要观察的就是loss值的变化,它用来衡量一个batchsize的样本的前向传播。下图展示了loss值随时间变化,其形状可以得知学习率的情况:
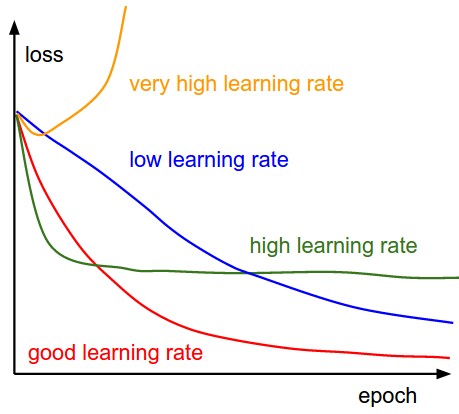
左边是一个示意图,学习率过低,学习效果时线性增长。高的学习率开始时学习效果时指数增长,但最后loss值在一个较高水平(绿色线);这是因为在优化时,“能量”过大,导致参数震荡不能找到一个最优点。右边是实际训练中loss值随时间变化图,它是在CIFAR-10上训练的。这个loss值变化看起来比较合理(lr可能比较小,也难说),batchsize可能也比较小,因为loss的噪声比较大。
loss值的抖动和batch size有关。batch size太小,抖动会比较厉害。如果batch是整个训练集,loss值震动就会最小,因为每次更新的梯度都是最优。
也有人使用对数loss函数,因为学习过程可能是指数的,取对数后学习过程会像直线。如果有交叉验证模型,把结果画到同一副图上,这样它们之间差异会比较明显。
有时对数loss函数看起来很搞笑:lossfunctions.tumblr.com
训练/验证准确率
第二重要的就是观察在训练集和验证集上的准确率。这样可以直观得到模型是否过拟合。
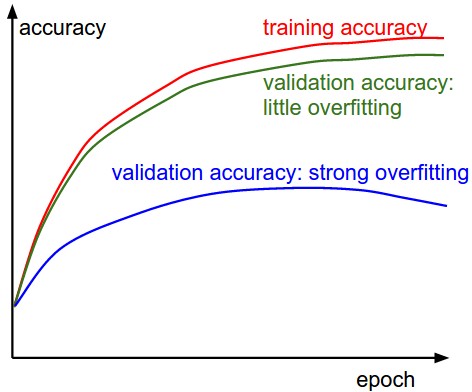
训练集和验证集上准确率之间的“间隔”可以衡量过拟合情况。蓝色线的验证集准确率和训练集准确率间隔过大,说明已经过拟合(验证集准确率可能在增长后还会下降)。在实践中遇到这种情况,一是加强正则化(更强的L2,更多的drop out),二是增大训练集。绿色线情况,验证集和训练集准确率变化完全一致,说明模型容量还不够大,增加参数来增加模型容量。
权重和更新的比例
最后要观察的是更新幅度和参数幅度之间的比值。注意,这里的更新不是原始梯度,例如在sgd中,是梯度乘以学习率。需要对每个参数及单独计算。这个比例的一个启发值是大概1e-3左右。如果太低,学习率太小,如果高学习率过大。下面是计算过程
1 | # assume parameter vector W and its gradient vector dW |
不是计算最大或最小值,而是计算和观察其范数的值。这些矩阵通常是相关的,也能得到近似的结果。
激活/每层梯度分布
参数的错误初始化会减慢学习速度,甚至使学习停止。这个问题比较容易解决,一种解决方法是画图每层梯度/激活函数的直方图。直觉上看,如果有奇怪的分布,那么可能就有问题。例如tanh神经元输出的直方图分布,应该可以看到参数在[-1,1]之间所有数值都有分布,但是如果全是0或者-1、+1,那么一般就是有问题了。
第一层可视化
如果使用像素数据,那么可视化第一层可能会有帮助: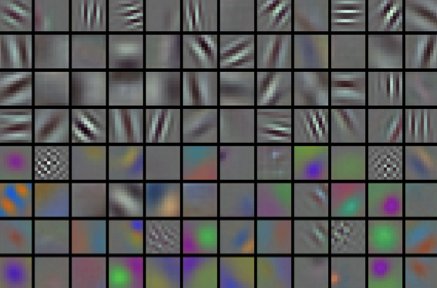
左边的图中有许多噪声,网络没有收敛,可能是学习率或正则化的问题。右边的图比较平滑、干净、特征比较多,说明学习过程很好。
参数更新
在反向传播中计算好解析梯度,使用解析梯度更新参数,有不同的方法来更新参数。
神经网络的优化是当前非常热额研究热点。本文只是讲解实践中常常用到的技巧,给出直观上的解释。如果需要了解细节,我们提供了额外读物。
SGD and bells and whistles
Vanilla update
最简单的更新就是沿着梯度负方向更新。夹着x是参数向量,dx是梯度向量1
2# Vanilla update
x += - learning_rate * dx
这里learning_rate是一个超参数,它是固定值。当使用这个训练集,且学习率足够小,就可以降低loss函数值。
Momentum update
Momentum更新在深度网络中总能有更好的收敛速度。这种更新方式可以从物理优化角度来解释。loss值看一看到山的高度(有高度就有势能$U=mgh$, 且$U \propto h$)。用随机数初始化参数等价于设置质点在某位置的速度为0;优化过程可以看做参数向量(即质点)滚动的过程。
因为质点所受的力和势能的梯度相关($F = - \nabla U$),质点所受的力是loss函数的负梯度。有$F=ma$,所以负梯度和质点的加速度成正比。这个观点和SGD不同,SGD是直接合并位置;而物理学观点是梯度只是影响速度,速度影响位置。
1 | # Momentum update |
这里引入了参数v,初始化为0,还引入了参数mu。说的不恰当一些,这个参数可以当做动量(momentum,常常设置为0.9),它的物理意义是和摩擦力一致。这个变量减小了速度,降低了系统的势能,否则质点在山底也不会停下来。使用交叉验证时,这个参数可以设置为$[0.5, 0.9. 0.95. 0.95]$。和学习率退火时间类似,动量随时间设置不同值可以略微改善优化效果,动量在学习后阶段可以增大。一个典型的设置是在初始时设置为0.5,后面随着epoch增大,直至到0.99.
随着动量更新,参数会在有梯度的方向上增加速度。
Nesterov Momentum
Nesterov Momentum和标准的Momentum有点不同,对于凸优化,在理论上它能有更好的收敛,在实践中,它的性能优于标准momentum。
Nesterov Momentum的核心思想是,当参数向量在位置x时,回看一下momentum更新,只考虑动量部分(忽略第二项梯度部分),通过mv*v影响参数。当我们打算计算梯度梯度时,把未来一个近似位置x+mu*v当做“向前看”-这个点是将来更新后位置的附近,计算这个点x+mu*v的梯度,而不是旧位置x。
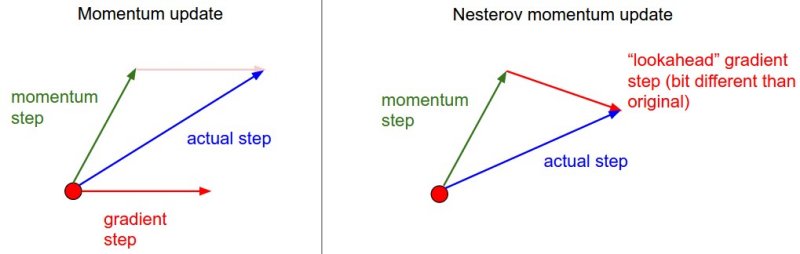
左边是标准的Momentum update,右边是Nesterov momentum update。红色的点是“旧位置”。
实现如下:1
2
3
4x_ahead = x + mu * v
# evaluate dx_ahead (the gradient at x_ahead instead of at x)
v = mu * v - learning_rate * dx_ahead
x += v
在实践中,人们更喜欢类似标准SGD或momentum update的形式。可以通过参数x_ahead=x+m*v改写实现,用x_ahead表示更新,不用x。即实际中计算时总是计算前一步的版本。公式中x_ahead(改回x)变为:1
2
3v_prev = v # back this up
v = mu * v - learning_rate * dx # velocity update stays the same
x += -mu * v_prev + (1 + mu) * v # position update changes form
我们推荐阅读公式来源和数学推导Nesterov’s Accelerated Momentum(NAG):
Advances in optimizing Recurrent Networks by Yoshua Bengio, Section 3.5.
Ilya Sutskever’s thesis (pdf) contains a longer exposition of the topic in section 7.2
Annealing the learning rate
在训练深度网络过程中,要学会对学习率退火。如果学习率太高,系统就有太大的动能,参数在某一范围内波动,loss函数不能到达更窄更深的位置。合适减小学习率是有技巧的,如果减小太慢,loss函数值会一直某一范围波动,提高很少,这样浪费计算资源;如果减小太快,系统动能很快降了下来,将不能到达最好的位置。常常用到的退火策略有以下三种:
Step decay
经过几个epoch,就降低学习率。典型值为讲过5个epoch就减小为一半,或经过20个epochs变为原来的0.1倍。当然这些具体值要依具体问题和模型而定。一个启发式的做法是在实践训练中观察交叉验证集的错误率,入股错误率停止增大,学习率乘以一个常量(例如0.5)。
Exponential decay
数学形式为$\alpha = \alpha_0 e^{-k t}$,其中$\alpha_0,k$是超参数,$t$是迭代。
1/t decay
数学形式为$\alpha = \alpha_0 / (1 + k t )$,其中$\alpha_0,k$是超参数,$t$是迭代。
Second order methods
还有一类优化的方法,主要是基于Newton’s method,它的迭代形式为:
$$ x \leftarrow x - [H f(x)]^{-1} \nabla f(x) $$其中$H f(x)$是Hessian matrix,它是函数二阶偏导数组成的方阵。$\nabla f(x)$是梯度向量。直观上看,Hessian matrix描述了loss函数的局部曲率,局部曲率可以更我们更高效的更新参数。乘以Hessian matrix的转置,在曲率小时大步前进,在曲率大时小步前进。注意,上面更新中没有学习率,这正是比一阶导数有优势的地方。
二阶导数虽然理论上更加有效,但是实际中很少用到。因为矩阵求逆计算量太大,且占用太多内存。对于Hessian矩阵求逆也有一些研究实际中有一些计算近似的方法,例如L-BFGS,具体内容可以参考
Large Scale Distributed Deep Networks is a paper from the Google Brain team, comparing L-BFGS and SGD variants in large-scale distributed optimization.
SFO algorithm strives to combine the advantages of SGD with advantages of L-BFGS.
Per-parameter adaptive learning rate methods
前面的所有方法都是对所有参数同时使用。调优学习率是昂贵的过程,因此许多工作投入到自适应学习率,甚至每个参数适应学习率。虽然很多方法需要设置其他超参数,但是这些超参数在比较大的变化范围上,不会太影响系统性能,但是原始学习率会影响。下面,介绍一些在实践中常常用到的自适应算法。
Adagrad
Adagrad是由Duchi et al..提出,实现如下
1 | # Assume the gradient dx and parameter vector x |
cache和dx大小相同,跟踪每个参数的平方和,用来归一化参数更新,需要注意它是element-wise。从代码中可以看出,如果梯度大,那么将会减小学习率;如果梯度小,将会增大学习率。求平方根操作非常重要,没有它算法效果将会非常差。平滑项eps(范围通常为1e-4到1e-8)可以避免分母为零。Adagrad的缺点是在深度学习中,单调的学习率被证明通常是太激进,很早就使得学习停止了。
RMSprop
RMSprop是非常高效但是没有公开发表的自适应学习率的方法。它是Adagrad方法的修改版,减小它的集锦性,单调减小学习率。尤其是它使用了梯度平方的滑动平均。
1 | cache = decay_rate * cache + (1 - decay_rate) * dx**2 |
其中decay_rate是超参数,其值一般为[0.9, 0.99, 0.999]。x+=更新部分和Adagrad相同,但是cache变量部分不同。RMSProp依然是基于梯度大小对学习率进行调节,有不错的效果,和Adagrad不同的是,它不会单调递减学习率。
Adam
Adam是最近提出的,有点像带有动量的RMSProp,它的精简版更新如下:
1 | m = beta1*m + (1-beta1)*dx |
注意到其更新非常像RMSProp,不同点是这里使用的是平滑版本的梯度m,而不是原始梯度dx。论文中推荐参数的值eps=1e-8,beta1=0.9,'beta2=0.999。实践中,推荐默认使用Adam,它的效果往往好于RMSProp;但是也推荐尝试一下SGD+Nesterov Momentum。完整的Adam更新包括偏置矫正机制,因为向量m,v在前几步中初始化,因此网络“热身”之前,偏置为零。了解更多细节,参考论文或课外读物。
课外读物:
Unit Tests for Stochastic Optimization proposes a series of tests as a standardized benchmark for stochastic optimization.
通过下面两张动画可以直观感受不同优化算法:
上面图片是loss函数的等高线。注意到带有动量的方法,一旦走偏,很难纠正回来,它的线路就行小球向下滚。下面图片是带有鞍点的图形,某些维度开口向上,某位维度开口向下。注意到SGD方法很难突破对称性的限制,被困在了高点。与此相反的是,像RMSprop这样的算法可以看到鞍点更低的梯度;因为更新过程中分母选项的原因,将会增大这个方向的学习率,帮助RMSProp在这个方向前进。
超参数优化
训练神经网络包括许多超参数集,神经网络中最常见的包括:
1、初始化学习率
2、学习率衰减算法(例如常量衰减)
3、正则化强度(L2,dropout 强度)
还有一些相对弱一些的超参数(神经网络不那么敏感),例如per-parameter adaptive learning method, 动量及其设置。这一小节,讲解调参的额外方法和技巧。
实现
大的神经网络需要很长时间来训练,调参可能需要几天甚至几周。设置代码时,要有一个worker连续随机设置参数,之后优化。在训练时worker在完成一个epoch后,测试在验证集上的性能,且保存check point到文件,文件中要有在验证集上性能的信息。还要有一个master程序,用来管理worker程序,还可以检查check point,记录训练过程等。
优先选用一个验证集,而不是交叉验证
在大多场景中,使用大小合适的验证集可以让代码简单,没必要使用多折交叉验证。可能常常听说用交叉验证集来设置超参数,在大多情况下,只是使用了一个验证集。
超参数的范围
以对数为尺度来设置超参数。例如,学习率取样范围learning_rate = 10**uniform(-6,1);即学习率是10的指数幂,幂的大小(-6,1)上的随机数。这个策略也适用于正则化强度。这是因为学习率和正则化强度是乘的影响,因为对于它们值的范围取值,乘以或除以某个数,而不是加上或减去某个数。但是有些超参数(drop out)是在原有尺度进行设置,dropout=unifor(0,1)。
优先使用随机搜索,而不是网格搜索
论证过程参考 Random Search for Hyper-Parameter Optimization。原理大概为,超参数中,一些超参数比另一些重要,因此随机搜索更有可能找到更优的超参数。
对边界上的最优值格外小心
边界上的最优值可能不是全局最优。例如,对于学习率,其范围learning_rate = 10 ** uniform(-6, 1),最终使用的学习率不应该出现在边界处,如果时,要扩大范围来进一步搜索。
由粗到细来搜索
实践中,现在一个大范围搜索,之后逐步缩小搜索范围。在大范围搜索时,只需要一个或半个epoch即可,因为某些不合适的超参数极有可能让网络学不到任何东西,甚至引起loss值爆炸。在细搜时,让训练运行5个左右的epoch,缩小范围后,还可以进一步细搜,直到找到最优值。
贝叶斯超参数优化
贝叶斯超参数优化是专注于超参数空间更高效导航算法的研究领域。其核心思想是在探索上找平衡–探索和不同超参数设置之间的平衡。在此基础上开发出一些库。但是在卷积网络实践中,找一个范围认真设置的性能一般很难超越随机搜索。这里有更详细的讨论。
评估
模集成
在实践中,可以把性能提升几个百分点的一种方法是:训练多个独立的模型,在测试时把多个模型的结果求平均。随着模型数量增大,性能会单调递增,但是越到后面提升越少。不同模型越是多样性,性能提升越是明显。有以下几种方式集成:
同一个模型,不同初始化
使用交叉验证找到最优的超参数。使用最优超参数、不同初始化方式来训练。这种方式缺点是它仅仅依靠不同初始化。
交叉验证选择最优模型
使用交叉验证找到最优模型,选择最优参数的前几个(例如10个)来做模型集成,增加模型的多样性。这样可能会把次优模型包含进来。这种方式比较容易实践,因为它在交叉验证后不需要再训练了。
同一个模型,不同记录点
训练过程中,随着时间进行,每个epoch都保存一个模型,这样就会有多个模型,使用这些模型来集成。这样虽然缺少多样性,但是在实践中也有良好性能。优点是这种方式代价很小。
训练时运行参数的平均值
和上一个方法相关,一种代价很小,但是可以提升模型一两个百分点的方法:训练时在内存保存参数的拷贝,当loss函数出现指数下降时,记录这个参数;最终使用记录这些参数的平均。这个平滑版本的参数在验证集上有更小的误差。一个直观理解为目标函数是碗状的,参数在碗的周边跳跃,参数的平均更有可能到达碗的更深处。
模型集成的缺点就是测试单个样本时,计算量增大了。Geoff Hinton的论文Dark Konwledge提出集成模型为单个模型的方法,通过修改目标函数,加入似然函数来实现。
总结
训练一个神经网络
1、梯度检查,使用小批量数据。
2、合理性检查,确保初始化的loss合理,过拟合小数据集,在小的训练集上达到100%准确率。
3、训练时,监督loss,训练集/验证集准确率。参数更新幅度和参数值比值应该在1e-3附近;如果训练神经网络,可视化第一层权重。
4、推荐使用的2种更新方法:SGD+Nesterov Momentum or Adam。
5、训练不同阶段,减小学习率。例如,固定几个epoch后降低或验证集识别率停止后降低。
6、随机搜索超参数(不是网格搜索),分阶段搜索(1-5个epoch在大的范围搜索,之后搜索范围)。
7、使用模型集成得到额外提升。
拓展参考
SGD tips and tricks from Leon Bottou
Efficient BackProp (pdf) from Yann LeCun
Practical Recommendations for Gradient-Based Training of Deep Architectures from Yoshua Bengio