讲解网络的各种层
卷积神经网络和普通神经网络非常类似。卷积神经网络由神经元组成,每个神经元包含权重weight和谝置bias;它接收上一层输入,和权重相乘,通常再经过一个非线性函数(可选)输出。整个网络拟合一个可微分的score function:从原始图像到每类别得分。在最后一层(全连接层)包含一个loss function(例如SVM/Softmax),常规神经网络用到的技巧,卷积神经网络通常也适用。
架构总览
上一节用到的网络是全连接网络,它接收一个向量输入,得到每个类别的得分。全卷积网络不太适用于图像,在CIFAR-10中,图像大小是32x32x3,所以第一层网络的每个神经元将会有32323=3072个权重;当输入图像变大后,权重数量会以乘积形式增长;神经元的数量不止一个,这么多的权重,将会导致过拟合。
3维神经元。图像由三个维度组成:width、height、channel,因此“层”也是对应三维:width、height、depth,这里的depth是激活函数的维度,不是神经网络的depth。
卷积神经网络和全连接网络的不同在于,卷积神经网络只是用全一层的部分输出作为一个神经元的输入,这样可以大大减少权重个数。下面是可视化的一个对比: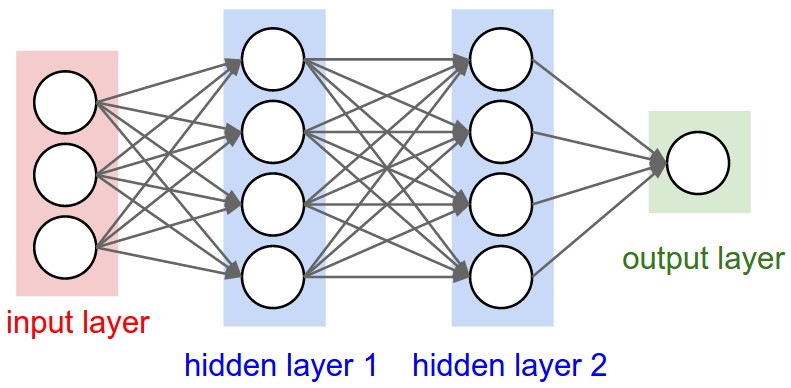
左边是3层的全连接网络。右边是卷积神经网络,把神经元按照三维来组织的。
常用的层
卷积神经网络由层构成,每层有简单的接口:把输入的三维数据转换为输出的三维数据,通常使用可微函数或者不用参数。
卷积网络由一系列的层构成,数据在层之间流动。常用到的层包括:卷基层Convolutional Layer、池化层Pooling Layer、全连接层Fully-Connected Layer。
以一个分类CIFAR-10图像的卷积网络为例,网络结构[INPUT-CONV-RELU-POOL-FC],具体如下:
INPUT[32x32x3],数据为原始像素值,高宽都为32,三通道RGB。
CONV layer,卷积层计算对象连接到输入层神经元的输出,每次计算都是权重和局部输入的点乘。如果使用12个滤波器(核),输出为[32x32x12]。
RELU layer,ReLU是逐元素操作(elementwise),使用函数$max(0,x)$,经过ReLU后,输出大小不会变,还是[32x32x3]。
POOL layer,池化层是下采样操作(在宽weight和高height纬度上),这样输出会变小为[16x16x12],但是depth不变。
FC layer全连接层将会计算每类别对应的得分,输出大小为[1x1x10],代表10类每个类别的得分。全连接顾名思义,这一层的每个神经元和上一层的每个神经元之间都有连接。
通过上面的网络,把原始像素值通过不同的层,最终得到每个类别的得分。上面的层中,卷积层和全连接层有参数,池化层没有传参数,训练是训练有参数的层。
总结:
- 卷积网络最简单的结构就是一系列的层的连接,把输入的图像转换为输出。
- 有不同类型的层,最常用的有CONV/FC/RELU/POOL。
- 每个层都是接收三维数据,之后通过一个可微函数转换成一个三维输出。
- 层可以包含参数,也可以不包含。
- 层可以包含超参数,也可以不包含。
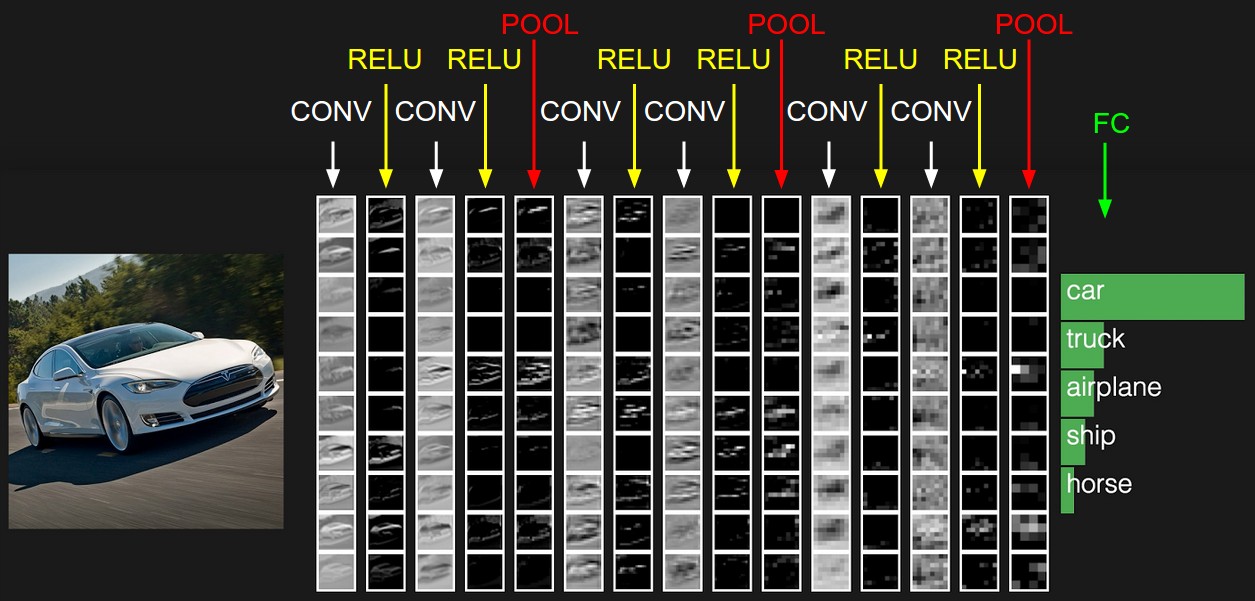
上图就是一个卷积网络的可视化,因为对三维数据难以可视化,对三维数据通过行来切片平铺展示,最后一层是对应每类的得分。这个网络是tiny VGG NET。
下面详细介绍每种类别的层的结构。
卷积层
卷积层是卷积网络的核心,大部分的计算量都在这个层。
概述
不考虑和大脑、神经元做对比,卷积层参数包含要学习参数的一个集合。每个滤波器参数长度和宽度比较小,但是深度和输入数据保持一致。在前向传播过程中,把卷积核沿着输入数据在宽和高上滑动,把对应的数据和卷积核做内积运算;随着卷积核的滑动,可以得到一个2维的激活图(activation map),激活图的值是卷积核在不同空间位置的响应。直观上看,网络会让卷积核学到“对某些特定物体或颜色产生激活”。假设我们有一个卷积核的集合,每个卷积核都会生成一个2维激活图,多个卷积核就可以在深度方向上得到输出。
大脑角度,从大脑角度看,每个3维输出可以看做一个神经元的输出,每个神经元只是观察到了输入数据的一部分,在空间上和左右两边的神经元进行参数共享。
局部连接,每个神经元只跟前一层输入的一个局部区域相连接;这个局部区域大型是一个超参数,叫做感受视野receptive field,其大小就是卷积核大小,其深度和输入数据深度一致。
例如,对于RGB CIFAR-10的图像,如果感受视野(卷积核/滤波器)大小为5x5,那么权重大小为[5x5x3],总共有参数553+1=76个(加上一个bias)。
如果输入数据大小为[16x16x20],感受视野(卷积核)3x3,那么权重为[3x3x20]。
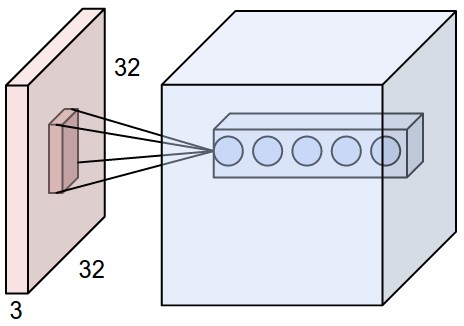
左图是32x32x3(CIFAR-10)的一个输入,卷积核只是连接到输入的局部部分,但是扩展到输入的整个深度。右边是一个神经元,它计算输入数据和权重的内积,再加上一个bias;随后经过一个非线性函数。
空间安排,前面已经解释了输入数据如何跟输出进行连接,但是还没讨论神经元的数量以及它们之间如何排列,这里需要用到三个超参数:深度depth,步长stride,零填充zero-padding:
1、输出的深度对应卷积核的个数,不同的卷积核查找输入中不同的物体。例如,输入是原始图像,那么深度方向上不同神经元可能被颜色、边缘、特定形状所激活。沿着深度方向上排列的叫做深度列depth column。
2、步长是卷积核滑动的距离,例如stride=1表示滑动一个像素;stride=2卷积核会滑动2个像素,这样得到的输出width和height会比输入小。
3、有时候,在输入的边缘上填充0会给计算带来方便,这种操作叫做零填充zero-padding。零填充的大小也是一个超参数,其大小会影响输出在空间上的大小(常常用来填充,使得输入和输入的width和height大小一致)
计算输出在空间的大小,输入的size为W,卷积核size为F,步长为S,零填充为P,那么输出的size为(W - F + 2P)/ S + 1。例如输入为7x7,卷积核3x3,零填充为0,步长为1,那么输入大小为5x5;如果步长为2,那么输出大小为3x3。

上图是沿着某一维度的例子,输入是7x7,卷积核是3x3(最右边),bias为零;左边stride=1,中间stride=2。注意(W - F + 2P)/ S一点要可以整除。
权重在同一个输入的激活图上,是共享的。
零填充的使用:上面的例子中,输出的size比输入小,如果使用零填充P = (F - 1)/2,那么输出和输出size大小将一致。
步长的限制:超参数有一些限制。例如,W = 10, P = 10, F = 3,那么步长S = 2就不合适,因为(W - F + 2P)/S + 1 = (10 − 3 + 0) / 2 + 1 = 4.5,不是整数,这将导致神经元不能整齐滑过输入数据。这样的参数被认为是无效的。卷积网络库可能会报异常,或者通过零填充/裁剪来使大小合理。
实际例子:AlexNet输入大小为[227x227x3],第一个卷积层F=11,S=4,P=0,(227-11)/4+1=55,第一个卷积层depthK=96,所有共有96个卷积核,每个卷积核[11x11x3]。
参数共享,参数共享可以减少参数个数。以AlexNet第一个卷积层为例,共有神经元555596=290,400,如果不适用参数共享,每个神经元有11113=363个权重和1个bias,共有参数290400*364=105,705,600 个。
可以基于几个假设来减少参数:如果计算位置(x,y)处的某一特征的卷积核,应该可以计算不同位置(x2,y2)处的相同特征,所以可以使用同一个卷积核。即可以在深度方向上做一个2维切片(depth slice),每个切片使用相同权重。这样AlexNet第一层就有961111*3=34,848个权重和96个bias。在反向传播时,要计算每个神经元都权重的梯度,这样要在一个深度切片上进行累加,更新时,单独更新每一个深度切片对应的权重。
注意,如果在一个深度切片上使用相同的权重,那么前向传播就是输入数据和权重的卷积运算(卷积层名字的由来),这也是为什么称权重为滤波器或卷积核。
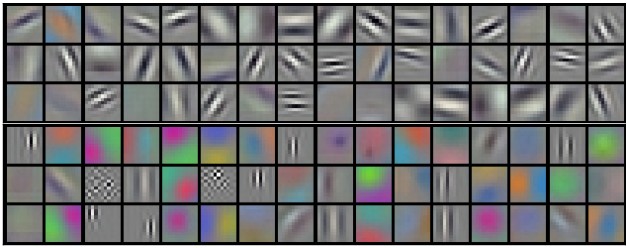
上图是AlexNet第一个卷积层权重[11x11x3]的可视化,对应96个不同卷积核,每个权重用来计算[55x55]个神经元。注意到参数共享是合理的:如果检测某一位置水平方向边界很重要,那么也应该适用于其他地方,因为具有平移不变性。因此没有必要再学习一个检测水平边界的卷积核了。
有时参数共享假设并没有意义。例如输入图像有明确的中心结构,这时我们希望在不同位置学习到不同特征。一个典型的例子就是人脸检测,人脸就位于图像中心位置,其他位置可能学到眼睛或头发特征;这种情况,就需要放松参数共享的限制,称这样的层叫做局部连接层Locallly-Connected Layer。
Numpy example,下面使用Numpy一个具体例子来说明,假设Numpy数组为X,
- 在深度上的某一列位置
(x,y),表示为X[x,y,:]。 - 在深度
d上的一个切片,表示为X[:,:,d]。
假设输入X的形状X.shape:(11,11,4)。零填充P=0,滤波器核F=5,步长S=2,输出size为(11-5)/2+1=4,输出用V来表示:
V[0,0,0] = np.sum(X[:5,:5,:] * W0) + b0V[1,0,0] = np.sum(X[2:7,:5,:] * W0) + b0V[2,0,0] = np.sum(X[4:9,:5,:] * W0) + b0V[3,0,0] = np.sum(X[6:11,:5,:] * W0) + b0
其中,*表示逐个元素相乘,W0表示权重,b0表示偏置bias,W0大小W0.shape:(5,5,4),5表示卷积核大小,4表示深度。计算在同一个深度切片时,使用的是同一个权重和bias,这就是参数共享。第二个特征图计算:
V[0,0,1] = np.sum(X[:5,:5,:] * W1) + b1V[1,0,1] = np.sum(X[2:7,:5,:] * W1) + b1V[2,0,1] = np.sum(X[4:9,:5,:] * W1) + b1V[3,0,1] = np.sum(X[6:11,:5,:] * W1) + b1V[0,1,1] = np.sum(X[:5,2:7,:] * W1) + b1V[2,3,1] = np.sum(X[4:9,6:11,:] * W1) + b1
上面是计算第二个特征图的过程。计算特征图后,往往跟着非线性操作例如ReLU,这里没有展示。
总结:
- 输入数据size:$W_1 \times H_1 \times D_1$
- 需要使用的超参数:
1、卷积核个数$K$
2、卷积核大小$F$
3、步长$S$
4、零填充大小$P$ - 输出大小size为$W_2 \times H_2 \times D_2$,其中
$W_2 = (W_1 - F + 2P)/S + 1$
$H_2 = (H_1 - F + 2P)/S + 1$
$D_2 = K$ 使用超参数共享,每个滤波器权重个数$F \cdot F \cdot D_1$,共有权重$(F \cdot F \cdot D_1) \cdot K$个,偏置$K$个。
输出中,在深度的第$d$个切片上(size为$W_2 \times H_2$),其结果是第$d$个卷积核与输入卷积的结果,卷积步长为$S$。
超参数的设置,习惯为$F = 3, S = 1, P = 1$。
卷积例子
因为3维数据难以可视化,下面图中,每一行是深度上的一个切片,输入时蓝色,权重是红色,输出是绿色。输入size$W_1 = 5, H_1 = 5, D_1 = 3$,卷积层参数$K=2,F=3,S=2,P=1$,即有2个$3 \times 3$的卷积核,步长为2,零填充为$P=1$。下面是动态示意图:
以矩阵乘积方式实现:
卷积操作是输入的局部区域和卷积核的点乘,可以利用这一点用一个大矩阵相乘来实现:
1、使用im2col操作,把输入的局部区域当做一列,展开为一个大矩阵。例如输入[227x227x3],卷积核[11x11x3],步长为4;从输入中取出[11x11x3]大小的块展开为一个列向量,列向量大小为11113=363。沿着步长为4来重复进行这个操作,在width和height方向分别迭代(227-11)/4+1=55次,共进行55*55=3025次。这样展开后矩阵X_col的size大小为[363x3025],每一列是局部视野展开后的数据。注意局部视野有重叠,因此展开后的列可能会有重复。
2、卷积核的权重展开为行。例如96个[11x11x3]的卷积核,展开后的权重矩阵W_row大小为[96x363]。
3、卷积的结果为上面两个矩阵相乘np.dot(W_row,X_col),相当于卷积核和感受视野的点乘。上面的例子中,得到结果为[96x3025]。
4、把得到的结果重新排列,正确的size为[55x55x96]。
这个方法的缺点是占用了过多内存,因为X_col中的数据有重复;优点是可以高效实用矩阵乘法(使用BLAS接口)。这个思想同样适用于pooling操作。
反向传播
卷积反向传播同样是卷积操作(对于数据和权重都是,但是在空间反转)。
1x1卷积
论文Network in Network首次发明了1x1卷积,信号处理背景的人可能疑惑。通常信号是2维数据,1x1卷积没有意义(只是缩放)。但是在卷积网络中,数据是3维的,滤波器深度和输入数据深度相同。例如输入[32x32x3],使用1x1卷积,是3维的点乘。
扩展卷积
Fisher Yu and Vladlen Kultun的论文引入了另外一个超参数叫做扩张dilation。前面我们讨论的卷积核是连续的,同样卷积核之间也可以有间隔。例如size为3的卷积核计算输入为x,w[0]*x[0] + w[1]*x[1] + w[2]*x[2],这是dilation为0的情况;如果dilation为1,那么计算为w[0]*x[0] + w[1]*x[2] + w[2]*x[4]。扩张卷积核正常卷积结合非常有用,例如可以在很少的层中汇聚到大尺度特征。使用2个3x3卷积,第二个卷积对输入数据的感受视野为5x5。可以看出如果使用扩展卷积,感受视野将迅速增长。
池化层
在卷积神经网络中,常常在连续卷积层中间隔插入池化层。池化操作可以减小数据量,从而减小参数,降低计算,因此防止过拟合。池化操作在每个深度切片上进行,例如使用MAX操作。常用的池化核实2x2大小,在每个深度切片的width和height方向下进行下采样,忽略掉75%(3/4)的激活信息。池化操作,保持深度depth大小不变。
池化层配置:
- 接收数据size $W_1 \times H_1 \times D_1$
- 需要参数
1、池化核大小$F$
2、步长$S$ 输出数据大小$W_2 \times H_2 \times D_2$
$W_2 = (W_1 - F) / S + 1$
$H_2 = (H_1 - F) / S + 1$
$D_2 = D_1$池化层没有参数。
- 注意,在池化层一般不会使用零填充。
在实际使用中,最长见到的两种池化层配置:$F = 3, S = 2$(叫做重叠池化);$F = 2, S = 2$,这个更常见。更大的池化核对网络有破坏性。
通用池化
除了MAX池化操作外,还有平均池化核L2-norm池化。平均池化在历史上用的比较多,现在渐渐被遗弃,因为和MAX池化相比,MAX池化往往性能更好。
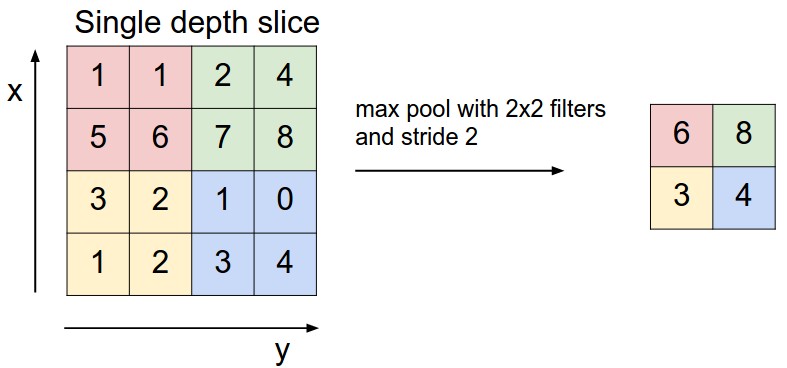
上图就是池化过程。左图输入为[224x224x64],池化核[2x2],输出为[112x112x64];右图为池化具体计算过程,使用的是MAX池化。
反向传播
前面提到,对于max(x,y)的前向传播,只允许值大的通过;反向传播时只允许值大的输入的梯度反向传播。因此,池化层前向传播时记录下值大者的索引(有时叫做switches),这样反向传播就很高效。
去掉池化
有些人不喜欢池化操作,可以考虑去掉池化层。例如Striving for Simplicity: The All Convolutional Net中全是重复的卷积层。为了降低数据大小,使用了大的步长。为了训练一个好的生成网络,可以去掉池化层,例如自编码(VAEs)或生成对抗网络(GANs:generative adversarial networks)。在未来的架构中,不使用池化层的可能性比较小。
归一化层
归一化层(Normalization Layer)是根据对大脑观察原理得来的。实践中有很多类型归一化层,但它们基本没有什么效果,即使有也微乎其微。因此逐渐被放弃。想了解归一化层,可以参考cuda-convnet library API.)
全连接层
如果一层的神经元和前一层的每个神经元都有连接,这样的层叫做全连接层。这样的层可以使用矩阵相乘再加上bias即可。
全连接层转为卷积层
全连接层和卷积层相似,卷积层的神经元和上一层输出局部区域相连接,使用了参数共享;因此它们之间可以相互转换。
一个卷积层,可以用一个全连接层来替换;替换后权重矩阵非常大,且大部分为零(因为卷积只是局部连接),权重矩阵中很多块相同(因为参数共享)。
全连接层可以转换为卷积层。例如对于一个全连接层$K = 4096$,输入为$7 \times 7 \times 512$,可以转换为卷积层$F = 7, P = 0, S = 1, K = 4096$,即卷积核和输入大小相同,输出变为$1 \times 1 \times 4096$。
FC->CONV
在实践中,全连接层转换为卷积层更为有用。AlexNet输入为224x224x3,通过一系列卷积池化层,得到7x7x512输出(224/2/2/2/2/2=7),之后通过2个大小为4096的全连接层,最后通过1000个神经元的全连接层计算出每类别的得分。可以替换掉3个全连接层为3个卷积层:
- 替换掉第一个全连接层,其输入为[7x7x512],替换用的卷积核$F = 7$,输出为[1x1x4096]。
- 替换掉第二个全连接层,其输入为[1x1x4096],替换用的卷积核$F = 1$,输出为[1x1x4096]。
- 替换掉第三个全连接层,其输入为[1x1x4096],替换用的卷积核$F = 1$,输出为[1x1x1000]。
上面这些转换操作,涉及到重塑(例如reshape)权重矩阵$W$。这样在单一前向传播中,可以更高效;因为当输入图像比较大时,可以沿着额外空间滑动。
例如AlexNet[224x224x3]输入,输出[7x7x512],长和宽减小2x2x2x2x2=32倍;如果输入为[384x384x3],那么输出为[12x12x512],因为384/2/2/2/2/2=12。后面跟着的三个卷积层,最后得到输出为[6x6x1000],因为(12 - 7) / 1 + 1 = 6。之前输出为[1x1x1000]对应一个类别一个得分,现在为结果为[6x6x1000]。不把全连接层替换为卷积层,输入为[384x384x3],使用[224x224]窗口,步长为32滑动,得到6x6个[224x224x3]图像,最终结果也是[6x6x1000]。
上面两种方法得到结果一样,显然前一种效率更高。这样的计算技巧在实践中常常使用;例如把小图像resize更大,使用转换后的卷积网络,计算多个位置得分,最终取平均值。
如果我们想使用的步长小于32,可以使用多次前向传播。第一次使用原图前向传播;第二次使用步长16沿着宽和高平移,把平移后的图片输入到网络计算。
- IPython Notebook例子Net Surgery展示如何使用Caffe实践转换。
卷积网络架构
卷积网络通常由CONV,POOL,FC三种类型的层组成,其中POOL默认为Max pool;RELU也显式指出。下面讨论怎么组合这些层。
层模式
最常见的模式是连续几个CONV-RELU,后面跟着一个POOL;重复这样的结构几次,直到输出比较小,在某一位置使用FC。最后一个FC输出结果,例如类别得分。即常见的模式为:
INPUT->[[CONV->RELU]*N]->POOL?]*M->[FC->RELU]*K->FC
其中*表示重复,POOL?表示可选;一般N >= 0(通常N <= 3), M >= 0, K >= 0(通常K < 3)。例如一些常见的卷积网络架构模式如下:
INPUT->FC,实现的是一个线性分类器,这里N=M=K=0。INPUT->CONV->RELU->FC。- `INPUT->[CONV->RELU->POOL]*2->FC->RELU->FC,在每个CONV后面有一个POOL。
INPUT->[CONV->RELU->CONV->RELU->POOL]*3->[FC->RELU]*2->FC,这里每2个CONV后面有一个POOL,这样的结构在大的深度网络常常见到,在POOL层破坏特征前,连续多个CONV层可以提取更复杂的特征。
宁愿使用连续多个小的滤波器,不使用一个大的滤波器。例如连续3个CONV,每层滤波器核大小都是3x3。第一层CONV对于INPUT感受视野是3x3,第二层CONV对于INPUT感受视野是5x5,第三层对于INPUT的感受视野是7x7;如果换用一层CONV,核大小为7x7,将会有以下缺点:1、一层对于输入来说是线性计算,三层具有很好的非线性,具有更强的表达能力。2、假设channel数为$C$,对于一层7x7卷积层,共有权重$C \times (7 \times 7 \times C) = 49C^2$,而三层3x3卷积,共有参数$3 \times (C \times (3 \times 3 \times C)) = 27C^2$。可以看出,连续的小卷积核,具有更少的参数和更强的表达能力;但是连续小的卷积核在训练时占用更多内存,因为在反向传播时需要用到中间结果。
最新进展
上面提到的按照组合组成卷积网络方法已经收到挑战。来自Google的Inception结构和来自微软的Residual Networks没有按照上面方法设计网络结果;它们设计更加复杂。
实战经验:使用在ImageNet上效果好的任何方法
90%的应用不需要过多思考如何设计网络架构。”don’t be a hero”:不是不断设计变换你自己的网络架构,你需要查看任何能在ImageNet挑战赛上表现性能好的网络,下载预训练模型,用自己数据finetune。很少情况需要你从头训练和设计,在Deep Learning school我也强调了这一点。
层大小设计模式
到现在为止还没提及层中常规超参数;下面将先介绍这些超参数设计准则,然后来讨论:
输入层INPUT包含图像,其大小一般可以连续整除多个2。常见的包括32(CIFAR-10),64,96(STL-10),224,384,512。
卷积层CONV使用核小的滤波器(3x3,最多5x5),步长$S=1$;如果输入输出height和width保持不变,那么使用零填充$P=(F-1)/2$。如果必须使用大的卷积核(例如7x7),通常在第一层使用。
池化层POOL是对输入数据在height和width上的下采样,最常见的下采样max-pooling,$F=2,S=2$,这样将会丢掉75%激活信息。还有一个也比较常见的,$F=3,S=2$。更大的池化层很少见,因为池化层会丢弃特征,太大的池化层影响性能。
减少尺寸设计的问题
前面设计中,CONV输入输出heigh和width不变;如果步长大于1或不使用零填充,那么CONV也将会引起height和width减小,这时需要认真设计,确保数据和核大小匹配。
为什么CONV中步长为1
在实践中,小步长效果更好。使用步长为1,输入输出在卷积空间大小保持不变,这样只有在POOL中下采样才会引起空间尺寸减小。
为什么使用padding
在CONV使用padding,可以保持输入输出空间维度尺寸不变,也可以提升性能。如果在CONV不使用padding,经过CONV后,数据空间维度尺寸会略微减小,这样图像的边缘信息将会很快丢失掉。
基于内存限制的妥协
卷积网络中,内存消耗很快,且会限制卷积网络。例如输入[224x224x3]的图像,使用64个3x3大小滤波器,零填充$P=1$,则输出为[224x224x64]。这个数量,将会有1千万激活,占用72M内存(每张图像,对于激活和梯度都是)。因为GPU显存的限制,常常要做出妥协;实践中,常常在第一层做出妥协,例如ZFnet第一层卷积核7x7,步长为2,AlexNet第一层卷积核7x7,步长为4。
实例
卷积网络中有几个经典网络:
LeNet,第一个成功的卷积网络,由Yann LeCun在九十年代发明。最出名的是它的架构,已经应用到邮政编码和数字识别。
AlexNet,第一个在机器视觉领域留下的网络,由Alex Krizhevsky, Ilya Sutskever and Geoff Hinton发明,赢得了2012年的 ImageNet ILSVRC challenge,识别率远远超过第二名(top 5 错误了16%,第二名为26%)。AlexNet类似LeNet,但是更深更广,使用了连续的CONV(之前都是CONV后跟着POOL)。
ZF Net,2013年ILSVR冠军,由Zeiler和Rob Fergus发明,ZF Net是他们名字缩写。ZF Net是基于AlexNet微调而来,扩大了中间卷积层的尺寸,减小了第一个卷积层的核和步长。
GoogLeNet,2014年ILSVR冠军,来自Google,由Szegedy et al发明。它的主要贡献在于发展了Inception结构,Inception架构可以减小参数个数(只有4M,相比AlexNet有60M)。它还在卷积层顶部使用平均池化层替代全连接层,减小了许多不重要的参数。后续还有几个版本,最新的为inception-V4。
VGGNet,2014年ILSVRC的亚军是Simonyan and Andrew Zisserman发明的VGGNet。VGGNet向我们证明了深度对于卷积网络的重要性。最终性能最优的网络是16层CONV/POOL,从输入到输出层结构相同,都是3x3卷积核2x2池化。预训练模型可以在caffe上直接使用。VGGNet缺点是非常耗计算资源和内存,它有140M参数。大部分参数在第一个全连接层,后来发现它可以移去,且性能几乎不会有影响,因此减少了参数个数。
ResNet,Residual Network由He等发明,赢得了2015 ILSVRC冠军。它的特点是使用了跳跃连接,大量使用了batch normalization。ResNet在网络的末端没有使用全连接层;可以参考Kaiming的报告(videoslides)。它是目前(2016-05-10)最好的卷积网络。可以参考最近最这个网络的优化Kaiming He et al. Identity Mappings in Deep Residual Networks (2016-03发表)。
详细分析VGGNet
以VGGNet为例,详细分解。VGGNet由卷积层(核3x3,步长1,零填充1)和池化层(2x2max池化,步长2,没有零填充)。下面分解每一层的大小,并记录每层权重个数。
1 | INPUT:[224x224x3] memory:224x224x3=150k weights:0 |
通常来说,卷积网络中,最前面几个卷积层占用了大部分内存,第一个全连接层占用了大部分参数。在这个例子中,第一个卷积层包含100M参数,参数总个数才140M。
计算资源考虑
卷积网络最大限制在于内存,GPU内存一般为3/4/6G,当前最好的GPU大概有12G。有三种主要占用内存的来源:
中间数据。每个卷积层都有激活的原始数据和梯度(它们大小相同),大部分的激活数据在前面几个卷积层中;要记录它们是因为在反向传播时需要使用。但是在测试时就可以释放前面激活层数据占用的内存。
参数。网络中有大量参数,反向传播时它们的梯度,如果使用momentum,Adagrad,RMSProp还要记录一步缓存,所以参数存储空间要在最原始基础上乘以3甚至更多。
卷积网络实现。实现还要占用各种混杂(miscellaneous)内存,例如图像批数据,它们的扩展数据等。
对参数(激活、梯度、混杂)个数有了大概估计后,应该转换为GB单位。单精度乘以4,双精度乘以8,得到占用字节数;最终换算成GB。如果占用内存过多,最简单办法是减小batch size;因为大部分内存是被激活数据占用。
额外资源
这些资源涉及到实现:
- Soumith benchmarks for CONV performance
- ConvNetJS CIFAR-10 demo在浏览器实时查看计算结果。
- caffe一个流行的卷积网络库。
- ResNet Torch7实现。